六轴陀螺仪加速度传感器,姿态解算方法
”gpio iic 初始化 加速度传感器 数码 欧拉角 陀螺仪“ 的搜索结果
参考文章: 四元数四元数完全解析及资料汇总 写在开头, 首先不太像做一个搬运...以BMI088为例,手册上明确说了这个IMU是由Accelerometer(加速度计)和Gyroscope(陀螺仪)两部分构成, 也能读到 Accelerometer 的单位是 mG (0
读取:温度传感器、加速度传感器、陀螺仪、DMP姿态解算后的欧拉角等数据,通过串口上报给上位机(温 度不上报),利用上位机软件(ANO_Tech匿名四轴上位机_V2.6.exe),可以实时显示MPU6050的传感器状 态曲线,并...

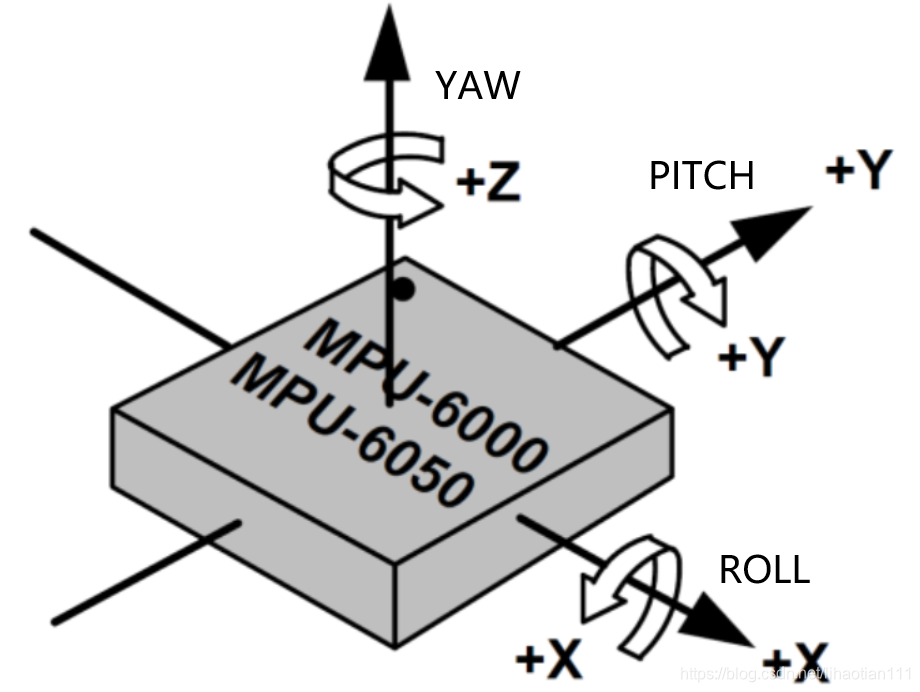
它是由3轴陀螺仪、3轴加速度传感器组成的6轴运动处理芯片,还可以通过一个预留IIC接口外接磁力传感器(如GY-282磁罗盘),其它型号还有:MPU6000、MPU9150、MPU9250等。 我们常用它来给系统输入欧拉角。 关于欧拉角...

首先,需要初始化加速度计和陀螺仪,并将其与微控制器连接。此外,还需要为程序设置一些常量,例如采样率、滤波器参数等。 2. 数据采集 接下来,程序需要定期从加速度计和陀螺仪中读取数据。这些数据可以通过I2C或...
IMU姿态解算 IMU,即惯性测量单元,...本篇将通过软件解算的方式,利用欧拉角与旋转矩阵来对陀螺仪与加速度计的原始数据进行姿态求解,并将两种姿态进行互补融合,最终得到IMU的实时姿态。 本篇的姿态解算选用的旋转
维特智能角度传感器通过加速度计、陀螺仪、磁强计等测量数据,经过软件算法解算,获取到当前的角度信息。传感器覆盖了单轴、3轴、6轴、9轴、10轴、GPS惯导等一系列的传感器。传感器的分类与特点如下: 传感器...
可惜第二版硬件还没到,磁力计用不了,没法验证效果~今天先总结下陀螺仪和加速度计的六轴数据融合。 版权声明 原创文章,转载请说明出处:sheng-blog.cn 原文出处加计和陀螺仪都能计算出姿态,但为何要对它们...

【陀螺仪从底层到应用】草稿草稿
通过x、y、z加速度和陀螺仪计算姿态角(欧拉角) #coding:utf-8 import math #IMU算法更新 Kp = 100 #比例增益控制加速度计/磁强计的收敛速度 Ki = 0.002 #积分增益控制陀螺偏差的收敛速度 halfT = 0.001 #采样...

通过数据融合,可进一步得到姿态角(欧拉角),常应用于平衡车、飞行器等需要检测自身姿态的场景3轴加速度计(Accelerometer):测量XYZ轴的加速度(具有静态稳定性,不具有动态稳定性)3轴陀螺仪传感器(Gyroscope)...
MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。当连接到三轴磁强计时,MPU-60X0提供完整的9轴运动融合输出到其主I2C或SPI...
而iPhone4的推出,由于加速度计的升级和陀螺仪的引入,与motion相关的编程成为重头戏, 所以,苹果在iOS4中增加一个一个专门负责该方面处理的框架,就是Core Motion Framework。 这个Core Motion有什么好处呢?...
此款imu内置44个寄存器,每个寄存器存储一个字节的数据,对应于不同的功能,具体功能参考上面的使用说明,其中8-42号寄存器储存的是imu的3个轴的实时数据,我们的目的就是通过c++读取这35个寄存器数据并加以解算。...
传感器应用之ICM20602六轴
标签: 传感器

此次项目需求为,通过将mpu60506轴加速传感器电焊到at89c51上,将传感器的获得数据显示到我们LCD1602液晶屏模块上。其中为了实现计步需要设计算法。 模块设计 其中我们需要模块为一下几个 1. MPU6050 2. LCD1602 3. ...



1. 初始化操作,包括获取加速度计和陀螺仪的初始值,计算初始姿态等。 2. 读取加速度计和陀螺仪的数据,根据运动学方程和测量方程计算出速度、位置和姿态等信息。 3. 进行误差补偿,包括零偏校准和比例积分校准等...
对官方I2C demo中功能的复现,进行相关内容的学习及探讨。功能2:三轴加速度陀螺仪-MPU6050模块
实际上,只要说到多少轴的传感器一般是就是指加速度传感器(即加速计)、角速度传感器(即陀螺仪)、磁感应传感器(即电子罗盘)。这三类传感器测量的数据在空间坐标系中都可以被分解为X,Y,Z三个方向轴的力,因此也...
% 归一化加速度计数据并计算重力加速度分量 g = [0; 0; norm(accel)]; a_norm = accel / norm(accel); % 初始化四元数,初始姿态为平躺 q = [1; 0; 0; 0]; % 设置采样时间和陀螺仪噪声标准差 dt = 0.01; gyro_...
lsm6ds3trc包含三轴陀螺仪与三轴加速度计。姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。他们各自有其自身的优点,在不同的领域使用不同的表示方式。在四轴飞行器中使用到了四元数和欧拉角。
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地